 |
|
 |
|
|
|
|
|
1. مرکز جرم
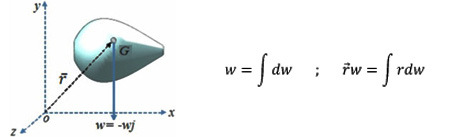
مرکز جرم (center of mass) یک جسم را میتوان به عنوان نقطهای
که تمام جرم جسم در آن متمرکز شده و تمام نیروهای خارجی به آن
نقطه اثر میکنند، تعریف کرد. برای یک جسم صلب، مکان مرکز جرم
نسبت به آن ثابت است و نقطهای مادی متعلق به آن جسم است.
باید توجه داشت که مرکز جرم لزوماً منطبق با مرکز هندسی
(geometric center) یک جسم نیست. مرکز ثقل (Center of Gravity) را میتوان به عنوان
نقطه اثر برآیند نیروهای گرانشی وارد بر یک جسم تعریف کرد.
هنگامی که جسم در یک میدان گرانشی یکنواخت قرار دارد، مرکز جرم
و مرکز ثقل آن بر هم منطبق هستند. اما در میدانهای گرانشی
غیریکنواخت، این دو نقطه با هم متفاوتند و این مسأله باعث
ایجاد گشتاور گرانشی کوچک اما قابل اندازهگیری میشود.
مختصات مرکز جرم
تعداد زیادی ذره که
الزاماً در یک صفحه
نیستند بلکه در فضا
توزیع شده اند، از
روابط زیر قابل
محاسبه است:
|
 |
 |
 |
|
که در آن M برابر با جرم کل دستگاه است.
به طور کلی مرکز جرم دستگاهی از ذرات که با
r
نشان داده میشود، به عنوان میانگین موقعیتهای هر ذره (r)
با جرم m تعریف میشود.
|
|
|
 |
|
|
و یا برای اجسام
پیوسته داریم:
|
 |
|
برای یک توزیع پیوسته جرم با چگالی
 و
جرم کل M، رابطه جمع بالا به فرم انتگرالی زیر تبدیل
خواهد شد: و
جرم کل M، رابطه جمع بالا به فرم انتگرالی زیر تبدیل
خواهد شد:
|
 |
|
روشهای متداول اندازهگیری مرکز ثقل شامل
سیستم آویز، تک تکیهگاه، چند تکیهگاه و
سیستمهای دورانیاند. در این میان
سیستم دورانی، دینامیکی و بقیه در
دسته روشهای استاتیک
به شمار میروند.
انتخاب هر یک از این
روشها به فرم، ابعاد
و وزن قطعه کار و
نیز دقت مورد نظر در
تعیین مرکز ثقل بستگی
دارد.
در
برخی طراحیها تعیین
موقعیت مرکز ثقل بهعنوان مقدمهای برای
تعیین تانسور ممان
اینرسی حول نقطه CG
است. نمونه کاربرد آنرا
میتوان در طراحی سیستم
کنترل راکتها،
موشکهای ماهوارهبر
و فضاپیماها مشاهده
نمود. در بعضی موارد
تعیین مرکز ثقل، خود
به خود هدفی برای حفظ
تعادل وسیله نقلیه
است. تنظیم بار
هواپیماها و کشتیها
که توسط افراد متخصص
این حرفه (load-master) انجام میگیرد، نمونههایی از
این کاربرد میباشد.
در صنعت هوایی و
دریایی، این تخصص با
عنوان تنظیم وزن و
تعادل (Weight &
Balance) شناخته
میشود.
|
|
|
|
بازگشت به ابتدای
صفحه |
|
|
 |
|
|
|
2.
ممان اینرسی
ممان
اینرسی
(Moment of
Inertia)،
لنگر لختی یا همان
گشتاور ماند در واقع
میزان مقابله جسم در
برابر چرخش از حالت
طبیعی حول محور مشخصی
است. به ممان اینرسی،
اینرسی دورانی نیز میگویند. در واقع ممان
اینرسی همان نقشی را
که جرم ماده در
دینامیک خطی دارد، در
دینامیک دورانی بازی
میکند. این پارامتر
رابطهی بین ممنتوم
زاویهای با سرعت
زاویهای، گشتاور با
شتاب زاویهای و
چندین پارامتر دیگر
را بیان میکند. بنا
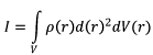
به تعریفی دیگر ممان
اینرسی مجموع جرم هر
المان از یک ماده است
که در فاصله آن از
محور چرخش به توان دو
ضرب گردیده است.
|
 |
|
در این فرمول r
فاصله هر قسمت از
محور چرخش است و
همچنین m نیز جرم هر
المان میباشد.
در حال پیوسته نیز
ممان اینرسی از فرمول
زیر که همان فرم
انتگرالی ممان اینرسی
است، بدست میآید:
|
 |
|
برای اطلاعات
بیشتر به این آدرس
مراجعه نمایید:
http://hyperphysics.phy-astr.gsu.edu/hbase/mi.html
|
|
تا کنون روشهای مختلفی برای
اندازهگیری ممان
اینرسی ابداع شده که
همگی بر پایه رابطه
M=Iα
میباشند.
مهمترین این روشها
آونگ پیچشی و حرکت
دورانی هستند.
در
روش آونگ پیچشی ابتدا
یک گشتاور معین به
جسم اعمال میشود.
سپس با اندازهگیری
تناوب نوسانات مقدار
α بهدست میآید. با
قرار دادن این مقادیر
در رابطه فوق میتوان مقدار I را بهدست آورد.
در روش
حرکت دورانی با اعمال
گشتاور ثابتی به جسم
جامد توسط یک
الکتروموتور، شتاب
زاویهای ایجاد شده
در آن را اندازه میگیرند. مقدار گشتاور
اعمال شده با اندازهگیری فاکتورهای تغذیه
الکتروموتور و مقدار
شتاب زاویهای نیز با
اندازهگیری زمان
رسیدن به یک rpm معین
به دست میآید.
در زیر تصاویر سادهای از وسایل اندازهگیری با روشهای
مذکور را مشاهده میکنید.
|
 |
|
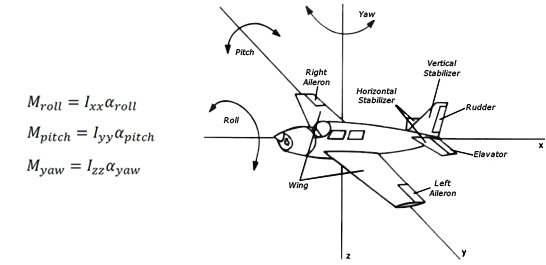
در
طراحی سیستم نیروی
محرک برای انجام
مانورهای وضعی اجسام
متحرک مثلا یک
هواپیما، گشتاورهایی
مشابه روابط زیر مورد
استفاده قرار
میگیرد.
|
 |
|
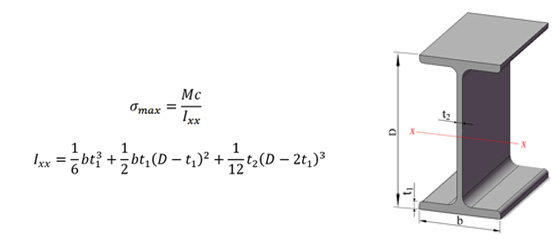
در محاسبات استحکامی
سازهها مانند حداکثر
لنگر خمشی مجاز بر
روی یک تیر فولاد
ساختمانی، از ممان
اینرسی با عنوان لنگر
دوم سطح یاد شده و به
صورت زیر از فرمول
محاسبه تنش بهدست
میآید.
|
 |
|
|
|
بازگشت به ابتدای
صفحه |
|
|
|
|
|
|
|
3.
حاصلضرب اینرسی
در یک تانسور ممان اینرسی که به صورت زیر نوشته می شود:
|
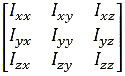 |
|
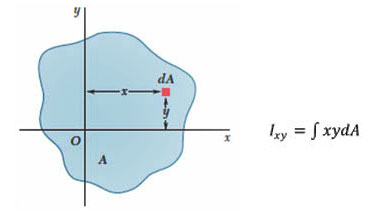
عناصر غیر قطری، ممان ضربی یا حاصلضرب اینرسی (Product of
Inertia) نامیده میشود. برای یک جسم صلب حاصلضرب اینرسی طبق
تعریف برابر است با:
|
 |
|
بنا بهقانون تقارن،
در تانسور فوق
Iyz ،Izx
،Ixz
،Iyx
،Ixy
و Izy دو به دو با
هم مساویند. برعکس
ممان اینرسی اصلی،
ممانهای اینرسی ضربی
میتوانند منفی یا
صفر هم باشند.
سیستمهای
اندازهگیری حاصل ضرب
اینرسی عمدتاً دورانی هستند. در
توسعه یک برنامه جامع
کنترلی برای اجسام
صلب، نیاز به تانسور ممانهای اینرسی با مولفههای کامل میباشد. همچنین برای
محاسبه انرژی جنبشی
دورانی، تکانه زاویهای و نیز گشتاور مورد
نیاز برای دوران یک
جسم جامد با شتاب
زاویهای α به ترتیب
از روابط زیر استفاده
میشود:
|
 |
|
|
|
بازگشت به ابتدای
صفحه |
|
|
|
|
|
|
|
|
|
|
4. پژوهشگران و متخصصان صنایع
این گروه آماده است
تا تجربیات خود را در
زمینهی خواص جرمی در
اختیار مدیران و
محققان شاغل در صنایع
مختلف که مایل به
انجام تحقیقات تئوری
یا پروژههای عملیاتی
مشترک میباشند قرار
دهد.
|
|
|
|
بازگشت به ابتدای
صفحه
|
|
|
|
|
|
|
|
دانشجویان مقاطع
کارشناسی و کارشناسی
ارشد رشتههای مهندسی
مکانیک، هوافضا،
فیزیک، ریاضی و رشتههای مرتبط با سیستمهای اندازهگیری و
ابزار دقیق میتوانند
جهت انجام تحقیقات
دانشگاهی یا رساله و
سمینار با کارشناسان
این گروه ارتباط
برقرار نموده و
فعالیت آکادمیک خود
را در راستای یک ایده
و کاربرد صنعتی تقویت
نمایند. همچنین
دانشجویان امکان
استفاده از مشاوره
متخصصان و آرشیو
مدارک فنی ما را به
صورت رایگان خواهند
داشت. برای
دریافت اطلاعات بیشتر
به صفحه
تماس با ما
مراجعه فرمایید.
|
|
|
|
بازگشت به ابتدای
صفحه
|
|
|
|
|
|
|
|
i72nd Annual International Conference on Mass
Properties Engineering
iMay 18-23, 2013,
St. Louis,
Missouri
ihttp://www.sawe.org/conferences/intl13
i71st
International
Conference
on Mass
Properties
Society
i(Download brochure)
|
|
|
|
بازگشت به ابتدای
صفحه
|
|
|
|
|
|
|
|
کتابچههای
راهنمای
دستگاهها،
مقالات علمی
متنوع،
بروشور و
یادداشتهای
کوتاه،
فیلمهای
آموزشی و
لوحهای
فشرده (CD)
حاوی منابع
علمی و
کتابهای
مرجع (Text
Book) در
دفتر این
گروه موجود و
آماده ارائه
به
دوستداران و
علاقهمندان
این رشته
میباشد.
برای نمونه
تعدادی از
کتابها و
مقالات در
زیر فهرست
شده و قابل
دانلود میباشد.
چنانچه در
جست و جوی
مطلب خاصی
هستید با ما
مکاتبه
فرمایید.
|
|
|
|
Vector Mechanics for Engineers, Beer & Johnston, Content_&_Appendix
Vector Mechanics for Engineers, Beer & Johnston, Chapter 5- Distributed Forces- Centroids and Centers of Gravity
Vector Mechanics for Engineers, Beer & Johnston, Chapter 9- Distributed Forces- Moments of Inertia
|
|
|
|
برای دریافت
متن کامل
کتاب استاتیک
و دینامیک
بییر
جانستون (102
مگابایت)
صرفا به ما
ایمیل
بزنید.
|
|
|
|
Mass Properties Measurement Handbook, Part 1
Mass Properties Measurement Handbook, Part 2
Mass Properties Measurement Handbook, Part 3
How to Calculate Mass Properties (An Engineer's Practical
Guide)
Mass Properties Measurement Errors Which Could Have Been
Easily Avoided
The
Seven Secrets of Accurate Mass Properties Measurement
Using the Moment of Inertia Method to Determine Product of
Inertia
Design of Orifice-Type Aerostatic Thrust Bearing
Guidelines for Mass Properties Control on International
Space & Missile Systems
Mass Properties Management and Control for Military Aircraft
Standard Coordinate Systems for Reporting the Mass
Properties of Flight Vehicles
Weight and Balance Data Reporting Forms for Guided Missiles
and Space Launch Vehicles
Weight Control Technical Requirements for Surface Ships
Mass Properties Control for Space Vehicles
|
|
|
|
نقل مطالب
این صفحه با
ذکر مأخذ
(www.spacetechnics.com) مجاز
میباشد.
|
|
|
|
بازگشت به ابتدای
صفحه
|
|
|
|
|
|
 |
|
 |
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
